運動量と同様に重要な物理量である角運動量。一言で言えば回転の勢いを表す量ですが,その定義とそこから生まれる慣性モーメントという物理量をざっと解説します。
並進運動と回転運動
まず角運動量を考える前に,物体の運動を2種類に分類してみます。
- 並進運動…物体全体が同じ方向に動く
- 回転運動…どこかを中心として回る
一つ目の並進運動ですが,これは高校物理でも扱ってきた運動方程式\[m\dfrac{d^2 \vec{r}}{dt^2} = \vec{F}\]によって記述することができます。物体が大きさを持っていても,どの部分も同じ方向に移動しているわけだから,重心の動きだけを考えれば十分という考え方です。
一方の回転運動ですが,これは適当な点(物体の内外部を問わない)を中心に物体が回転する運動です。高校物理では「力のモーメント」という範囲でこの領域の一部分を扱いました。高校レベルでは,大きさをもつ物体が回転しない条件等を考えるだけで実際に物体が回転し出した後を扱いませんでしたが,大学物理ではこれを扱っていくことになります。

それぞれの運動のイメージを図にするとこんな感じです。後のために,上で出てきた並進運動の運動方程式を次のように変形しておきます。\[m\dfrac{d^2 \vec{r}}{dt^2} = \dfrac{d (m\vec{v})}{dt} = \dfrac{d\vec{p}}{dt} = \vec{F}\]式としては全く等価ですが,力が加速度を生み出すという考えから,力が運動量\(\vec{p}\)の時間変化率であるという風に解釈を変更します。
角運動量の定義とその変化
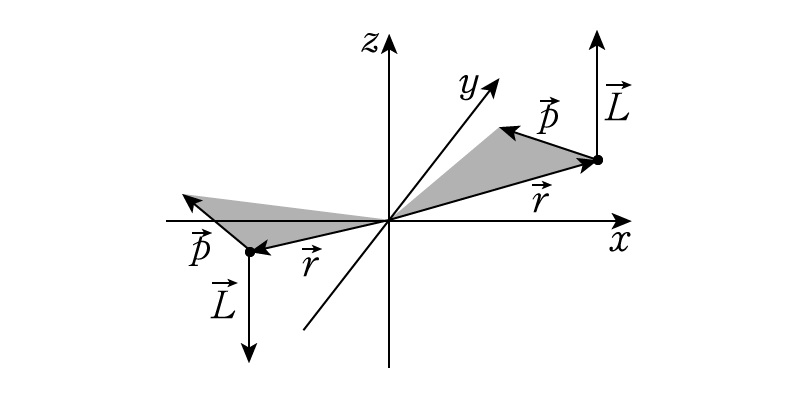
角運動量は回転の勢いを表す量ですが,回転運動はどこを中心に回転してるかの基準(回転軸)が必要です。その中心から物体までの位置ベクトルを\(\vec{r}\),運動量ベクトルを\(\vec{p}\)とするとき,角運動量\(\vec{L}\)は次で定義されます。
定義:角運動量
\[ \vec{L} = \vec{r} \times \vec{p}\]
角速度ベクトルによる表現
ここで角速度ベクトルという物理量を定義します。そもそも角速度とは速度の角度版,つまり単位時間あたりの角度の変化量を表すのでした。それと全く同じ大きさを持ち,向きを加えたものを新たに角速度ベクトルとして定義します。
定義:角速度ベクトル
角速度ベクトル\(\vec{\omega}\)を位置ベクトル\(\vec{r}\),速度ベクトル\(\vec{v}\)を用いて次で定義する。\[ \vec{\omega} = \dfrac{\vec{r}\times\vec{v}}{|\vec{r}|^2}\]
質点の慣性モーメント
以上の議論から次のことが言えます。
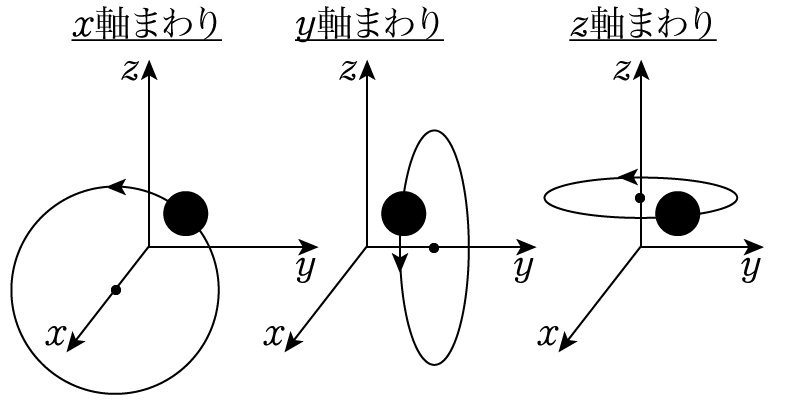
- \(x\)軸周りの回転 … \(r^2 = y^2+z^2\)
- \(y\)軸周りの回転 … \(r^2 = z^2+x^2\)
- \(z\)軸周りの回転 … \(r^2 = x^2+y^2\)
となります。これに応じて,慣性モーメントも回転軸によって値が異なります。それぞれの軸周りの慣性モーメントを\(I_x, I_y, I_z\)と書くことにすると,\begin{align} I_x &= m(y^2+z^2) \\ I_y &= m(z^2+x^2) \\ \quad I_z &= m(x^2+y^2)\end{align}となります。運動量における質量とは異なり,角運動量における慣性モーメントは方向によって異なるテンソルであることは忘れないようにしましょう。
回転の運動エネルギー
最後に回転をしている物体の運動エネルギーについて考えてみましょう。簡単のため速度の大きさ,角速度の大きさをそれぞれ\(v,\omega\)と書くことにすると,運動エネルギーは次のように書けます。\[ \dfrac{1}{2}mv^2 = \dfrac{1}{2} mr^2\omega^2 = \dfrac{1}{2}I\omega^2\]さてここまでくるとだんだんわかってきたと思いますが,並進運動における\(m\)や\(v\)を,回転運動では\(I\)や\(\omega\)に対応させることができます。最後に,並進運動と回転運動で各物理量がどのように対応しているのかを表にまとめましたので,参考にしてみてください。
| 並進運動 | 回転運動 | |
|---|---|---|
| 運動の勢い | \(\vec{p} = m\vec{v}\) | \(\vec{L} = m\vec{r}\times\vec{v}\) |
| 運動のしにくさ | 質量\(m\) | 慣性モーメント\(I\) |
| エネルギー | \(\dfrac{1}{2}mv^2\) | \(\dfrac{1}{2}I\omega^2\) |
| 方程式 | \(\dfrac{d\vec{p}}{dt} = \vec{F}\) | \(\dfrac{d\vec{L}}{dt} = \vec{N}\) |
コメント